篇1:三年级上美术 2 机器人 教案 人美版三年级上美术 2 机器人 教案 人美版资料可供全国地区适用。
大致详情:2、机器人备课时间: 授课时间:一、教学内容与目标:1、显性内容与目标:应知:了解机器人的相关知识,指导机器人与人有着密切的关系。应会:能用绘画的方法画一个机器人。2、隐性内容与目标:启发学生对科学技术发展的关注,激发学生热爱科学的热情,培养学生的创新精神。二、教学重点与难点:重点:了解机器人的种类、特点和功能,利用多种绘画用具进行绘画创作,或利用废旧材料设计制作。难点:生动地表现机器人的功能和作用。三、教学准备:课件、绘画工具和多种制作材料。四、教学过程:1、欣赏?感悟?畅想: 检查学生学习用具准备情况,调节...
图片详情:
  篇2:第1课认识机器人(课件)- 六年级全一册信息技术 苏科版(14PPT)第1课认识机器人(课件)- 六年级全一册信息技术 苏科版(14PPT)资料可供全国地区适用。
大致详情:(共14张PPT)认识机器人机器人(Robot)是一种具有高度灵活性的自动化机器,具备一些与人或者生物相似的智力,如感知能力、动作能力、规划能力等。机器人大脑:自动控制的程序。身体:具有一定的结构形态。动作:完成一定动作的能力。基本特征你见过机器人吗?它们是什么样子的?思考在我们的生活中,哪些地方使用了机器人技术?思考古代机器人机器人发展和分类工业机器人民用机器人军用机器人特种机器人思考机器人的各部分像人体的哪些器官?设计一款未来机器人,可以是文字描述,也可以是一幅画。小小设计师巴京网G应H31十关注勇哥说机器人b州1921-202机器人...
图片详情:
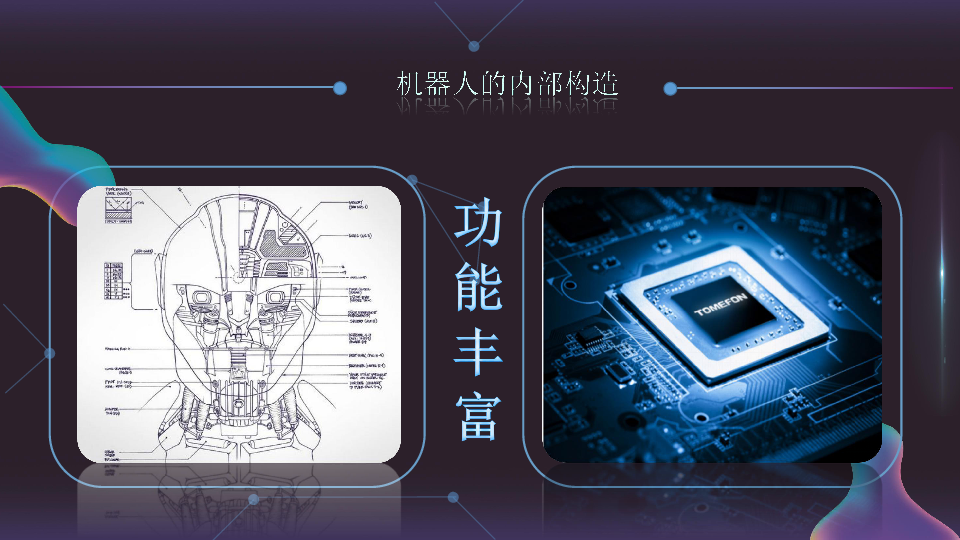
  篇3:三年级信息技术课件-第17课 机器人构造探秘 武汉版(共12张PPT)三年级信息技术课件-第17课 机器人构造探秘 武汉版(共12张PPT)资料可供全国地区适用。
大致详情:机器人构造探秘
我们的目的
本次活动,我们将通过对教学机器人的拆解和观察,了解它的基本构造。
我们的活动
一、猜想机器人的构造。
二、观察机器人的构造。
我们看到了这样一些零件,和我们猜想的是一样的。
三、解密机器人的构造。
我们的猜想。
这是机器人的马达,它为机器人提供动力,让它行动起来。
谢 谢
图片详情:
    篇4:武汉社版三年级全册信息技术 17.机器人构造探秘 教案武汉社版三年级全册信息技术 17.机器人构造探秘 教案资料可供全国地区适用。
大致详情:机器人构造探秘
教学目标:
知识目标:通过观察机器人,探索机器人的奥秘;
能力目标:
1、通过对机器人的拆解,了解它的内部构造。
2、了解机器人内部各个部位的作用
情感目标:激发学生对机器人的兴趣。
教学重点:观察并记录拆卸机器人的过程及步骤
教学难点:了解各个部位的作用
教学过程:
教学环节 教师活动 学生活动 教学反馈
一、导入 新课 上节课,我们了解了我们身边的人工智能——机器人。然而机器人始终蒙着一层神秘的面纱,似乎遥不可及。然而,今天我们与他们面对面的接触,即将步入机器人的狂热世界。它是一个什么样的“机器人”呢?
二、获取新知 1、猜想机器人的构造...
图片详情:
  篇5:2.5 制作循迹机器人 课件(19张PPT)2.5 制作循迹机器人 课件(19张PPT)资料可供全国地区适用。
大致详情:轨迹识别传感器
传感红外探头
可调电阻
轨迹识别传感器原理
红外发射器
红外接收器
轨迹识别传感器原理
各种传感器返回值
光感传感器
声音传感器
红外避障
传感器
轨迹识别
传感器
0---无光
1—有光
0---无声音
1—有声音
0---无障碍
1—有障碍
轨迹识别传感器左右探测状态及返回值
轨迹探头
数据显示
左
右
0 无信号 无信号
1 有信号 无信号
2 无信号 有信号
3 有信号 有信号
机器人与轨迹的位置关系
1
2
3
0
返回值与机器人需执行动作对应表
轨迹变量的返回值
机器人的状态...
图片详情:
  篇6:第三课机器人平台(课件)(共8张PPT+视频)六年级全一册信息技术苏教版第三课机器人平台(课件)(共8张PPT+视频)六年级全一册信息技术苏教版资料可供全国地区适用。
大致详情:(共8张PPT)机器人平台流程图流程图是用来表示解决某一问题的思想与方法。讨论:用自然语言说一说上学是否带雨具问题你是这样想的吗?观察流程图,你有什么发现?和你说的有什么区别?1多了开始、结束2有些符号不一样3一起探讨符号的区别发现流程图必须要有开始、结束小结开始、结束输入、输出判断过程自己设计一个判断选择流程图例子:红绿灯机器人平台介绍编程的工作过程开始准备上学是否是否下雨带上雨具不带雨具离开家,去学校结束开始在流程图中,特定的准备上学符号有特定的含义:是是否下雨否开始、结束过程带上雨具不带雨具判断离开...
图片详情:
    篇7:三年级上册美术课件-2《机器人》_人美版 (共25张PPT)三年级上册美术课件-2《机器人》_人美版 (共25张PPT)资料可供全国地区适用。
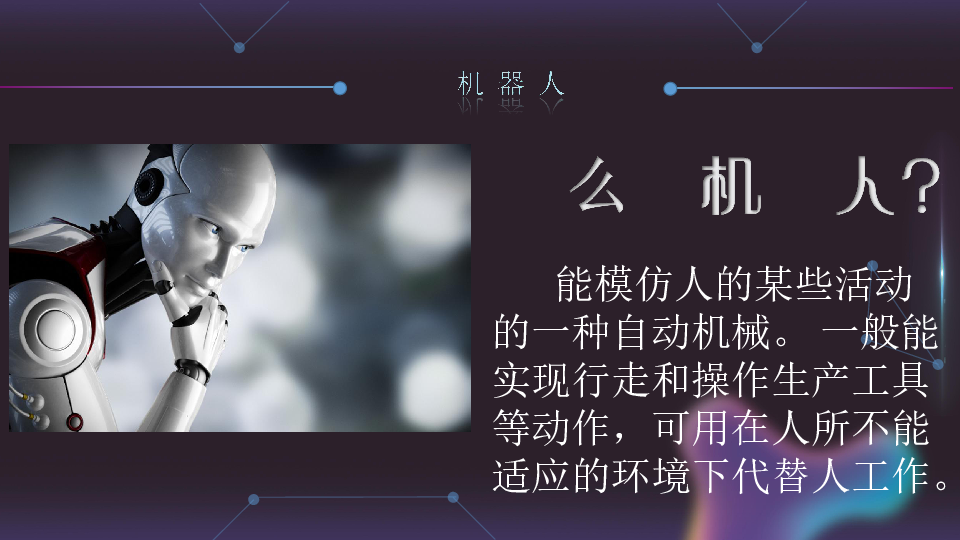
大致详情:(共25张PPT)能模仿人的某些活动的一种自动机械。一般能实现行走和操作生产工具等动作,可用在人所不能适应的环境下代替人工作。还有什么样的机器人?机器人必须要长得像人一样吗?AI造型多样AI机器人不仅外形独特,而且还各有所长!机器人形态各异,以拟人形象最常见。机器人外形多数由金属物质构成,所以外形线条比较硬朗,多以规则、立体的方形或圆形为主。少数机器人外表也有毛绒表皮或拟人形态肌肉制作而成,但是,所有的机器人内部是机械零件。AI创作请同学们为我们美丽的校园,设计一款造型多样,功能丰富的机器人。如:我们学校杂草特别多,需要设计一个除草机器人。保护同学安全需要一个护卫机...
图片详情:
    篇8:六年级全一册信息技术第6课机器人循光课件(10PPT)六年级全一册信息技术第6课机器人循光课件(10PPT)资料可供全国地区适用。
大致详情:(共10张PPT)机器人循光如何让机器人更智能化呢?自动检测自动识别自动判断自动执行传感器红外传感器的工作原理发射接收障碍物数字0表示无障碍,数字1表示有障碍。红外传感器流 程 图检测判断执行动作开 始I/O6=1鸣 叫单分支结构如果满足条件,就执行指定的动作。开始结束单分支结构属性设置窗口程 序条件循环单分支判断机器人循光挑战任务一:机器人如果遇到强光,就鸣叫一次。机器人循光挑战任务二:机器人如果遇到强光,红灯亮;如果没有强光,则灯灭。机器人循光挑战任务三:机器人循光行走机器人循光谢谢!●VOT...
图片详情:
  篇9:第6课 寻江机器人(课件(共19张PPT)+ 教案)第6课 寻江机器人(课件(共19张PPT)+ 教案)资料可供全国地区适用。
大致详情:中小学教育资源及组卷应用平台第6课寻光机器人教学设计课题寻光机器人单元六学科信息技术年级第三册学习目标(1)了解光敏传感器的组成及工作原理。(2)掌握光敏传感器的应用。(3)理解、掌握光敏变量表达式。(4)掌握寻光机器人程序。(5)能够在仿真界面中设置虚拟光源并测试机器人程序。(6)能够拼装寻光机器人,并在真实环境中调试机器人。重点理解、掌握光敏变量表达式,掌握寻光机器人程序的编写方法难点对光敏变量表达式的理解教学过程教学环节教师活动学生活动设计意图导入新课播放消防机器人视频机器人能够替代消防员,士兵和拆弹专家们完成危险工作。观看、倾听创设情...
图片详情:
  篇10:第8课 《仿真机器人控温》精品课件(20ppt)第8课 《仿真机器人控温》精品课件(20ppt)资料可供全国地区适用。
大致详情:(共20张PPT)第八课仿真机器人控温学习任务1.认识温度传感器。2.搭建自动控温装置。3.编写自动控温程序。开阔视野随着技术的进步,我们在日常生活中越来越多地运用了控温设备,如空调、热水器、冰箱、自动控温花房等。自动控温空调自动控温热水器开阔视野自动控温冰箱自动控温花房探究活动为什么现代化的花房里一年四季都是恒温的?那是因为花房里安装了自动控温装置:当温度过高时,会自动降温;当温度过低时,又会自动升温。活动主题:设计仿真机器人自动控温温度传感器是一种用于探测环境温度的设备,它通过温度探头测量环境或者物体表面的温度,并将测量到的温度值传输给微电脑,量程范围一般...
图片详情:
    篇11:1.1初识机器人(课件)- 六年级上册信息技术 西安交通版(21PPT)1.1初识机器人(课件)- 六年级上册信息技术 西安交通版(21PPT)资料可供全国地区适用。
大致详情:(共21张PPT)初识机器人初识机器人教材分析学生分析教法学法教学过程教学目标教 材 分 析选自:西安交通大学出版社小学信息技术六年级上册第一单元《走进机器人世界》第一课位置:机器人学习开篇课,决定了对整个课程的理解和感知,为日后学习打下基础。初识机器人教 材 分 析中小学信息技术指导纲要:目标——培养发展学生积极学习和探究信息技术的兴趣教材:07年教材机器人的发展故事、虚拟机器人等缺乏真实体验 难以提高学习积极性初识机器人教 材 分 析核心素养注重时代性,与时俱进本课内容:1、通过实物机器人的引入,了解机器人的基本组成及功能;...
图片详情:
     篇12:第5课 《认识机器人朋友》精品课件(20ppt)第5课 《认识机器人朋友》精品课件(20ppt)资料可供全国地区适用。
大致详情:(共20张PPT)第五课认识机器人朋友学习任务1.了解机器人的发展。2.认识机器人的特征。3.了解机器人家族。4.了解机器人三定律。开阔视野认识造型各异、身怀绝技的机器人。运送咖啡的自动无人机下围棋的机器人开阔视野自动攀墙的绘画机器人走独木桥的人形机器人探究活动说到机器人,人们眼前很容易就会浮现跟人一样有着眼睛、嘴巴、双手、双脚的模样。一般认为,机器人是一种能自动执行任务的装置,它不但可以接收人的命令,也可以运行人类编写好的程序,自动完成各项任务。活动主题:了解现代机器人进入20世纪后,机器人的研究与开发得到蓬勃发展,并且更注重实用性。按照技术发展水平,现代...
图片详情:
  篇13:第6课 《认识机器人构件》精品课件(23ppt)第6课 《认识机器人构件》精品课件(23ppt)资料可供全国地区适用。
大致详情:(共23张PPT)第六课认识机器人构件学习任务1.认识机器人组件。2.认识机器人传感器及其功能。3.搭建简易机器人。开阔视野欣赏简易机器人作品开阔视野学生搭建的机器人探究活动机器人本领越来越强了,在我们生活中随处可见它的身影,它已成为我们日常生活中的一部分。机器人是由什么组件组成的?它是怎样工作的?让我们带着这些问题,一起走进机器人的世界吧!活动主题:探索机器人世界1.认识机器人组件机器人一般由机械系统、驱动系统、控制系统和感知系统四部分组成。根据需要可以将各部分组件像搭积木一样自由组合搭建。活动主题:探索机器人世界用梁、杆、销等结构件组装成机身、操作臂;用轴...
图片详情:
     篇14:第二单元第7课 走进机器人 课件(29张PPT)+教案第二单元第7课 走进机器人 课件(29张PPT)+教案资料可供全国地区适用。
大致详情:中小学教育资源及组卷应用平台浙江摄影出版社信息技术六年级下第7课走进机器人教学设计课题走进机器人单元第二单元学科信息技术年级六年级学习目标1.了解机器人各部分的功能和组成;了解机器人编程的环境和界面。2.学会操作和控制机器人的一般过程。重点学会操作和控制机器人的一般过程。难点学会操作和控制机器人的一般过程。教学过程教学环节教师活动学生活动设计意图导入新课上节课我们对机器人有了初步的认识,那么机器人是由哪些部分组成的?它们有哪些作用呢?教学机器人有哪些?如何指挥它们呢?思考激发学生学习兴趣并快速进入学习状态讲授新课里面到底有什么奥秘呢?一...
图片详情:
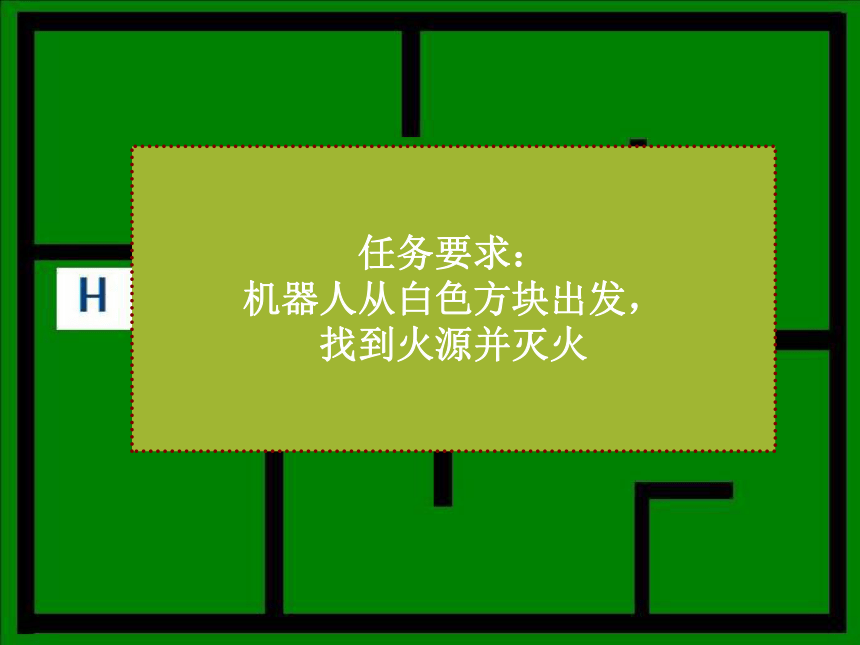
   篇15:2.7 设计灭火机器人 课件(14张PPT)2.7 设计灭火机器人 课件(14张PPT)资料可供全国地区适用。
大致详情:设计灭火机器人
任务要求:
机器人从白色方块出发,
找到火源并灭火
任务分析
为完成任务,必须解决两个问题
1、找到火源
2、灭火
搜寻火源
找到火源并灭火
返回起点
复习回顾
那么如何让机器人发现着火点呢?
可以使用火焰传感器
灭火我们可以用风扇代表,风扇开即可将火扑灭,当然要开一段时间哦,另外要注意哦,首先机器人要停下来,然后才能灭火
犹如我们上节课中走迷宫小游戏的f1,f2,就是子程序。
任务
完成机器人灭火程序并仿真
子程序
灭火
搜寻
探寻火源
灭火
返回起点
回到起点
子程序
图片详情:
    篇16:第9课 沿轨迹行走的机器人(课件(共19张PPT)+ 教案)第9课 沿轨迹行走的机器人(课件(共19张PPT)+ 教案)资料可供全国地区适用。
大致详情:(共19张PPT)第9课沿轨迹行走的机器人小学信息技术(粤教版)第三册下AB版教材新知导入玲玲,机器人能按照我们设计好的路线走吗?你为什么想这样做呢?这样我就可以让机器人参加赛车游戏了!哇,那一定很好玩!我们赶紧问问老师怎么做吧!新知讲解一、认识轨迹传感器轨迹传感器上有一组光电发射管和光电接收管,如图9-1所示,能识别地面上设置好的轨迹,机器人上装上它就如同有一双会认路的眼睛。光电接收管可调电阻光电发射管轨迹传感器的工作原理1.工作原理:轨迹识别传感器有两组红外发射,接收器探头.每一组探头会根据左、右两个颜色值的大小,来判断机器人是在轨迹线的左边、右边、中间,...
图片详情:
  篇17:第7课 《仿真机器人避障》精品课件(19ppt)第7课 《仿真机器人避障》精品课件(19ppt)资料可供全国地区适用。
大致详情:(共19张PPT)第七课仿真机器人避障学习任务1.了解红外避障传感器的组成。2.分析扫地机器人的行走规律。3.编写程序,在虚拟环境中模拟扫地机器人躲避障碍行走。开阔视野早期的扫地机器人由于存在体积大、笨重、售价高等问题,无法实现批量生产。随着科学技术的发展,现在的扫地机器人功能更加完善,更智能化,已经能够实现量产,开始走人普通家庭,如图所示。家用扫地机器人早期的扫地机探究活动与早期的扫地机器人相比,现在的扫地机器人更加智能,躲避障碍的能力也更强。活动主题:在仿真环境中模拟机器人躲避障碍行走想让机器人避开障碍物,首先要让它能看到障碍物。所以我们需要为扫地机器人安装上“...
图片详情:
     篇18:川教版 六年级下学期信息技术认识机器人课件(11张PPT)川教版 六年级下学期信息技术认识机器人课件(11张PPT)资料可供全国地区适用。
大致详情:(共11张PPT)六年级下册认 识 机 器 人机器人的大脑CPU就是机器人大脑单片机的C51笔记本的CPU机器人的大脑CPU输出设备输入设备运行原理机器人的手和脚连接件电 机机器人的眼睛机器人的眼睛光电传感器机器人的其它感官烟雾传感器测试传感器湿度传感器压力传感器超声波传感器一氧化碳传感器……触碰传感器亮度传感器火焰传感器机器人的也能“听”会“说”声音传感器听喇叭、蜂鸣器说机器人的能源电能光能核能设计自己的机器人名 称功 能传感器原 理谢谢!●●1100G010001010e101010000110...
图片详情:
     篇19:第二课 机器人的搭建 课件(共16张PPT)第二课 机器人的搭建 课件(共16张PPT)资料可供全国地区适用。
大致详情:广东教育出版社 信息技术 五年级 下册
积木件
S 轴
销
紧固件
单、双向连接板
格 梁
积 木 梁
轴套、齿条、蜗杆
齿轮
积木件
齿轮
齿条
蜗杆
S 轴
轴 套
序号
实物
名称
1
大板
2
中板
3
双向连接板
4
单向连接板
5
直角薄片
6
方孔积木梁
7
圆孔积木梁
8
圆孔格梁
9
半转接梁
10
紧固件
序号
实物
名称
11
轴套
12
S轴
13
红销(紧销)
14
黑销(滑销)
15
齿条
16
齿轮
17
轮毂
18
蜗杆
19
万向球组
20...
图片详情:
     Tags:三年级,机器人,ppt,精选,19篇

|
21世纪教育网,教育资讯交流平台




